-
ELM7211-9018 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 4.5В A, OCT, STO, Safe Motion, TwinSAFE Logic
0,00 ₽The ELM72xx-9018 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7212-0010 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 4.5В A, OCT
0,00 ₽The ELM72xx-0010 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7212-9016 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 4.5В A, OCT, STO, TwinSAFE Logic
0,00 ₽The ELM72xx-9016 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7212-9016 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 4.5В A, OCT, STO, TwinSAFE Logic
0,00 ₽The ELM72xx-9016 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7212-9018 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 4.5В A, OCT, STO, Safe Motion, TwinSAFE Logic
0,00 ₽The ELM72xx-9018 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7221-0010 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 8В A, OCT
0,00 ₽The ELM72xx-0010 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7221-9016 | Терминал EtherCAT, 1-канальный интерфейс движения, серводвигатель, 48 В В пост. тока, 8 В А, OCT, STO, TwinSAFE Logic
0,00 ₽The ELM72xx-9016 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7221-9018 | Терминал EtherCAT, 1-канальный интерфейс движения, серводвигатель, 48 В В постоянного тока, 8 В А, OCT, STO, безопасное движение, логика TwinSAFE
0,00 ₽Терминал серводвигателя ELM72xx-9018 EtherCAT с интегрированным интерфейсом абсолютного значения обеспечивает высокую производительность сервопривода в очень компактном исполнении. Технология быстрого управления, основанная на управлении током с ориентацией по полю и ПИ-регулировании скорости, поддерживает быстрые и высокодинамичные задачи позиционирования. Мониторинг многочисленных параметров, таких как перенапряжение и пониженное напряжение, перегрузка по току, температура клемм или нагрузка двигателя посредством расчета модели IВІT, обеспечивает максимальную эксплуатационную надежность.
-
ELM7222-0010 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 8В A, OCT
0,00 ₽The ELM72xx-0010 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7222-9016 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 8В A, OCT, STO, TwinSAFE Logic
0,00 ₽The ELM72xx-9016 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7222-9018 | EtherCAT Terminal, 2-channel motion interface, servomotor, 48В VВ DC, 8В A, OCT, STO, Safe Motion, TwinSAFE Logic
0,00 ₽The ELM72xx-9018 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7231-0010 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 16В A, OCT
0,00 ₽The ELM72xx-0010 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7231-9016 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 16В A, OCT, STO, TwinSAFE Logic
0,00 ₽The ELM72xx-9016 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7231-9016 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 16В A, OCT, STO, TwinSAFE Logic
0,00 ₽The ELM72xx-9016 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7231-9018 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 16В A, OCT, STO, Safe Motion, TwinSAFE Logic
0,00 ₽The ELM72xx-9018 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
ELM7231-9018 | EtherCAT Terminal, 1-channel motion interface, servomotor, 48В VВ DC, 16В A, OCT, STO, Safe Motion, TwinSAFE Logic
0,00 ₽The ELM72xx-9018 servomotor EtherCAT Terminal with integrated absolute value interface offers high servo performance in a very compact design. The fast control technology, based on field-oriented current and PI speed control, supports fast and highly dynamic positioning tasks. The monitoring of numerous parameters, such as overvoltage and undervoltage, overcurrent, terminal temperature or motor load via the calculation of a IВІT model, offers maximum operational reliability.
-
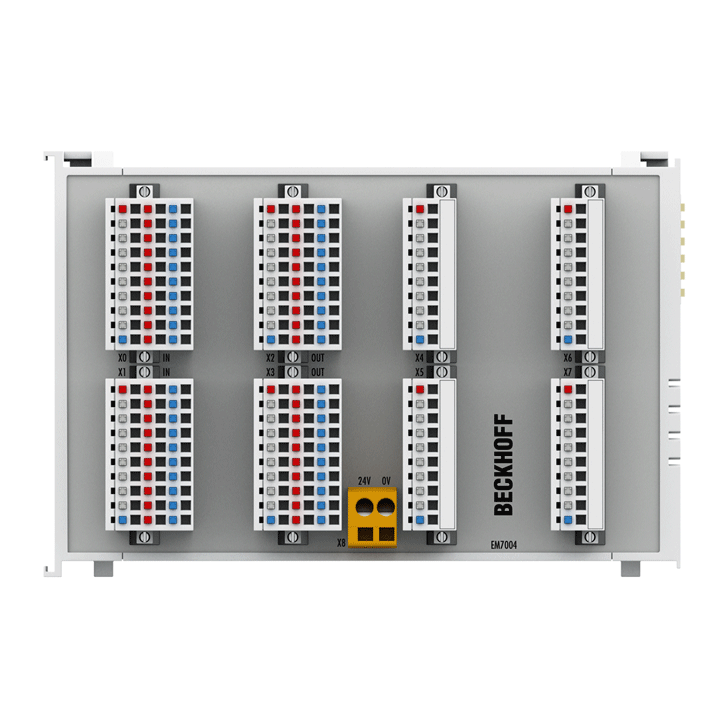
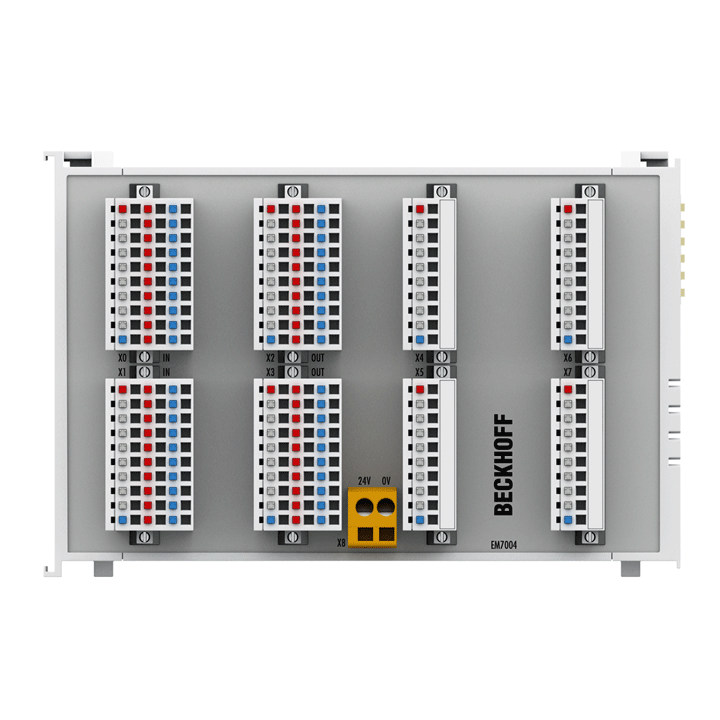
EM7004 | EtherCAT Terminal module, 4-channel motion interface, axis/servo drive, 24В VВ DC
0,00 ₽The EM7004 EtherCAT module interface is optimized for direct connection of four servo drives. The compact module features four integrated incremental encoders, 16В digital 24В VВ DC inputs and outputs, and four analog В±10В V outputs. For fast preprocessing, the digital outputs can be connected directly via the four encoders (PLS). This function is parameterizable. All inputs and outputs operate with a 24В V supply. The plug connectors X4, X5, X6 and X7 each feature an encoder input and an analog output. The connectors are galvanically isolated from each other and from the supply voltage. The connectors X0 and X1 with 16В digital inputs as well as the connectors X2 and X3 with 16В digital outputs enable 3-wire connection. PlugВ X8 is included in the scope of supply.
-
EM7004 | Терминальный модуль EtherCAT, 4-канальный интерфейс движения, осевой/сервопривод, 24 В В постоянного тока
0,00 ₽Интерфейс модуля EtherCAT EM7004 оптимизирован для прямого подключения четырех сервоприводов. Компактный модуль оснащен четырьмя встроенными инкрементальными энкодерами, 16 В цифровых входов и выходов 24 В постоянного тока и четырьмя аналоговыми выходами ±10 В. Для быстрой предварительной обработки цифровые выходы могут быть подключены напрямую через четыре энкодера (PLS). Эта функция параметризуется. Все входы и выходы работают с питанием 24 В. Штекерные разъемы X4, X5, X6 и X7 имеют вход энкодера и аналоговый выход. Разъемы гальванически изолированы друг от друга и от напряжения питания. Разъемы X0 и X1 с 16 В цифровыми входами, а также разъемы X2 и X3 с 16 В цифровыми выходами обеспечивают 3-проводное подключение. Разъем X8 входит в комплект поставки.
-
EP7041-0002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48В VВ DC, 5В A, M12, with incremental encoder
0,00 ₽The EP7041 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5 A output enable connection of end switches and a motor brake.
-
EP7041-1002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48В VВ DC, 1.5В A, M12, with incremental encoder
0,00 ₽The EP7041-1002 EtherCAT Box is intended for the direct connection of different Stepper Motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-1002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5В A output enable connection of end switches and a motor brake.
-
EP7041-2002 | EtherCAT Box, 1-канальный интерфейс движения, шаговый двигатель, 48 В В постоянного тока, 5 В А, M12, с инкрементальным энкодером
0,00 ₽The EP7041-2002 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The EP7041-2002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5В A output enable connection of end switches and a motor brake. The external motor is fed via an integrated plug.
-
EP7041-3102 | EtherCAT Box, 1-channel motion interface, stepper motor, 48В VВ DC, 5В A, for high-speed applications, M12, with incremental encoder
0,00 ₽The EP7041-3102 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EP7041-3102 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5В A output enable connection of end switches and a motor brake.
-
EP7041-4032 | EtherCAT Box, 1-channel motion interface, stepper motor, 48 V DC, 5 A, for high-speed applications, M12, with BiSS® C encoder
0,00 ₽The EP7041-4032 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EP7041-4032 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. The connection of a BiSS® C encoder enables a simple servo axis to be realized. The control loop is closed via TwinCAT. The encoder enables absolute feedback, so that no reference run is necessary when the system is started. Four digital inputs/outputs enable the connection of end switches and motor brake.
-
EP7047-1032 | EtherCAT Box, 1-channel motion interface, stepper motor, 48В VВ DC, 5В A, M12, with incremental encoder
0,00 ₽The EP7047-1032 EtherCAT Box is intended for stepper motors in the medium performance range. The PWM output stages cover a wide range of voltages and currents. Together with two inputs for limit switches, they are integrated in the EtherCAT Box. The EP7047-1032 can be adjusted to the individual motor and application by changing just a few parameters. The module is ideal for closed-loop control of the AS2000 stepper motors, which are equipped with a torsion-proof, integrated encoder (1024 inc/rev). Either a 5В V or a 24В V version can be used as the single-ended encoder.
-
EP7211-0034 | EtherCAT Box, 1-channel motion interface, servomotor, 48В VВ DC, 4.5В A, OCT, suitable for STO applications
0,00 ₽The EP7211-0034 servomotor EtherCAT Box with integrated One Cable Technology (OCT) offers high servo performance in a very compact design for AM8100 series motors with up to 4.5В A (Irms). The One Cable Technology combines motor cable and absolute feedback system in a single cable. The integrated electronic identification plate of the AM81xx motors can be read in automatically by the servo box to configure the motor parameters. In this way, wiring and commissioning requirements are simplified.
-
EP7342-0002 | EtherCAT Box, 2-channel motion interface, DC motor, 48В VВ DC, 4.5В A, M12, with incremental encoder
0,00 ₽The EP7342-0002 EtherCAT Box enables direct operation of two DC motors. The speed or position is specified by the automation device via a 16В bit value. By connection of an incremental encoder (24В VВ DC, single-ended), a simple servo axis can be realized. The output stage is protected against overload and short-circuit. The EtherCAT Box has two channels that indicate their signal state via light emitting diodes. The LEDs enable quick local diagnostics.
-
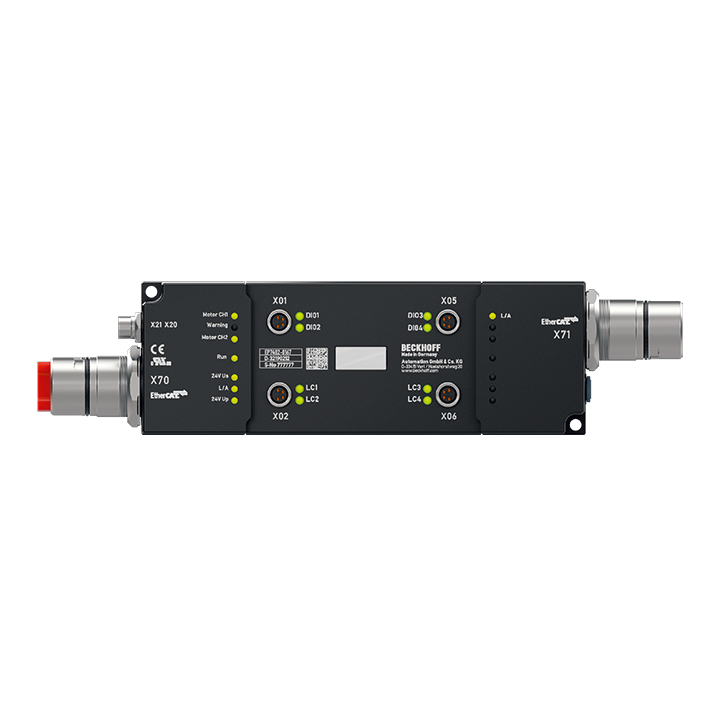
EP7402-0057 | EtherCAT Box, 2-channel motion interface, BLDC motor, 24В VВ DC, 3.5В A, M8, EtherCAT junction
0,00 ₽Модуль EtherCAT Box EP7402-0057 предлагает два выхода со встроенным контроллером MDR для прямого подключения двигателей роликов конвейера 24 В постоянного тока или других двигателей BLDC с макс. током 3,5 А. Восемь дополнительных цифровых входов/выходов позволяют подключать, например, фотоэлектрические выключатели и осуществлять связь между модулями модуля, работающими без ПЛК.
-
EP7402-0167 | EtherCAT Box, 2-channel motion interface, BLDC motor, 48В VВ DC, 3.5В A, M8
0,00 ₽Модуль EtherCAT Box EP7402-0167 предлагает два выхода со встроенным контроллером MDR для прямого подключения двигателей роликов конвейера 48 В постоянного тока или других двигателей BLDC с макс. током 3,5 А. Восемь дополнительных цифровых входов/выходов позволяют подключать, например, фотоэлектрические выключатели и осуществлять связь между модулями модуля, работающими без ПЛК.
-
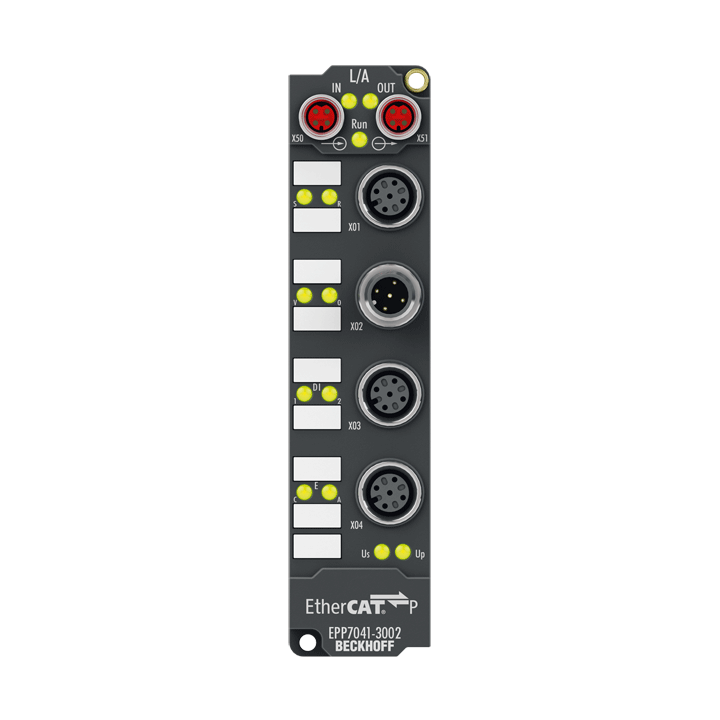
EPP7041-3002 | EtherCAT P Box, 1-channel motion interface, stepper motor, 48В VВ DC, 5В A, for high-speed applications, M12, with incremental encoder
0,00 ₽The EPP7041-3002 EtherCATВ P Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils cover a wide voltage and current range. The EPP7041-3002 can be adjusted to the motor and the application by changing just a few parameters. 256-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5В A output enable connection of end switches and a motor brake.
-
ER7041-0002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48В VВ DC, 5В A, M12, with incremental encoder, zinc die-cast
0,00 ₽The ER7041 EtherCAT Box is intended for the direct connection of different stepper motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The ER7041 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5В A output enable connection of end switches and a motor brake.
-
ER7041-1002 | EtherCAT Box, 1-channel motion interface, stepper motor, 48В VВ DC, 1.5В A, M12, with incremental encoder, zinc die-cast
0,00 ₽The ER7041-1002 EtherCAT Box is intended for the direct connection of different Stepper Motors. The PWM output stages for two motor coils with compact design are located in the module together with two inputs for limit switches and cover a wide voltage and current range. The ER7041-1002 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. Connection of an incremental encoder enables a simple servo axis to be realized. Two digital inputs and a digital 0.5В A output enable connection of end switches and a motor brake.
-
ER7041-2002 | EtherCAT Box, 1-канальный интерфейс движения, шаговый двигатель, 48 В В постоянного тока, 5 В А, M12, с инкрементальным энкодером, цинковое литье под давлением
0,00 ₽EtherCAT Box ER7041-2002 предназначен для прямого подключения различных шаговых двигателей. Выходные каскады ШИМ для двух катушек двигателя с компактной конструкцией расположены в модуле вместе с двумя входами для концевых выключателей и охватывают широкий диапазон напряжения и тока. ER7041-2002 можно настроить под двигатель и приложение, изменив всего несколько параметров. 64-кратный микрошаг обеспечивает особенно тихую и точную работу двигателя. Подключение инкрементного энкодера позволяет реализовать простую сервоось. Два цифровых входа и цифровой выход 0,5 В A позволяют подключать концевые выключатели и тормоз двигателя. Внешний двигатель питается через встроенный разъем.
-
I/O components
0,00 ₽ -
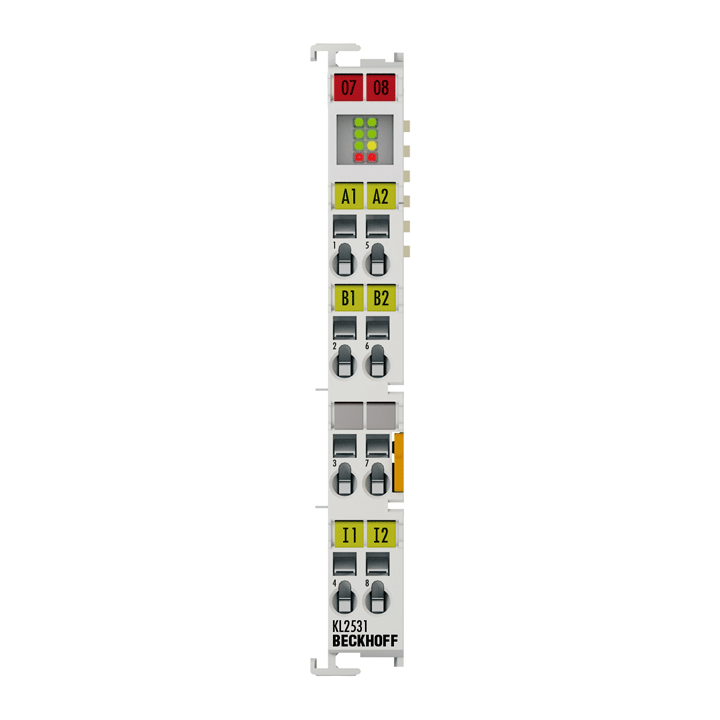
KL2531 | Bus Terminal, 1-channel motion interface, stepper motor, 24В VВ DC, 1.5В A
0,00 ₽The KL2531 Bus Terminal is intended for the direct connection of different small stepper motors. The slimline PWM output stages for two motor coils are located in the Bus Terminal together with two inputs for limit switches. The KL2531 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro-stepping ensures particularly quiet and precise motor operation. In many applications, integrated zero-speed monitoring makes an encoder system or limit switch unnecessary.
-
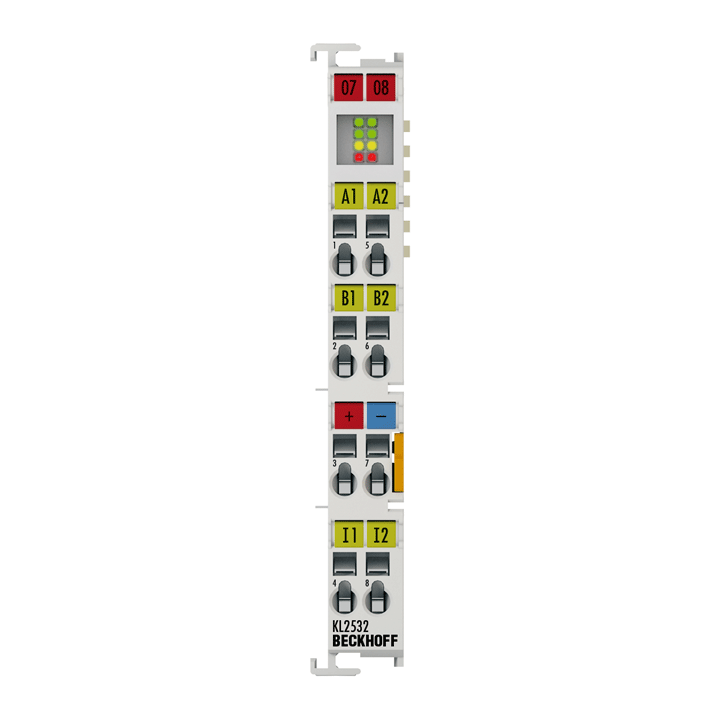
KL2532 | Bus Terminal, 2-channel motion interface, DC motor, 24В VВ DC, 1В A
0,00 ₽The KL2532 Bus Terminal enables direct operation of two DC motors. It is galvanically isolated from the K-bus. The speed is preset by a 16 bit value from the automation unit. The output stage is protected against overload and short-circuit. The Bus Terminal contains two channels that indicate their signal state by means of light emitting diodes. The LEDs enable quick local diagnosis.
-
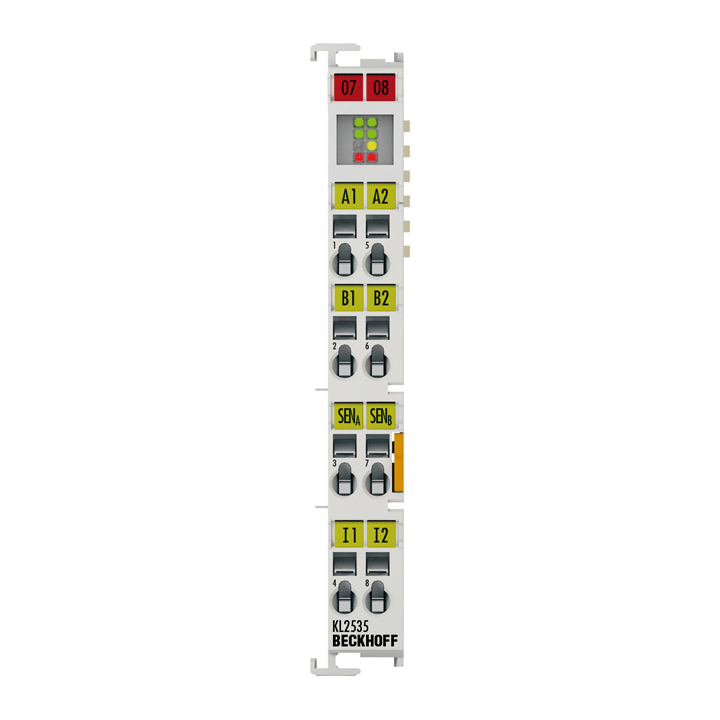
KL2535 | Bus Terminal, 2-channel PWM output, 24В VВ DC, 1В A, current-controlled
0,00 ₽The KL2535 output terminal controls an output current via pulse width control of the supply voltage. It is galvanically isolated from the K-bus. The current value (0 to В±1 A) is specified by the automation device via a 16 bit value. The output stage is protected against overload and short-circuit. The Bus Terminal contains two channels that indicate their signal state by means of light emitting diodes. The LEDs simplify local diagnosis by displaying typical load and wiring faults.
-
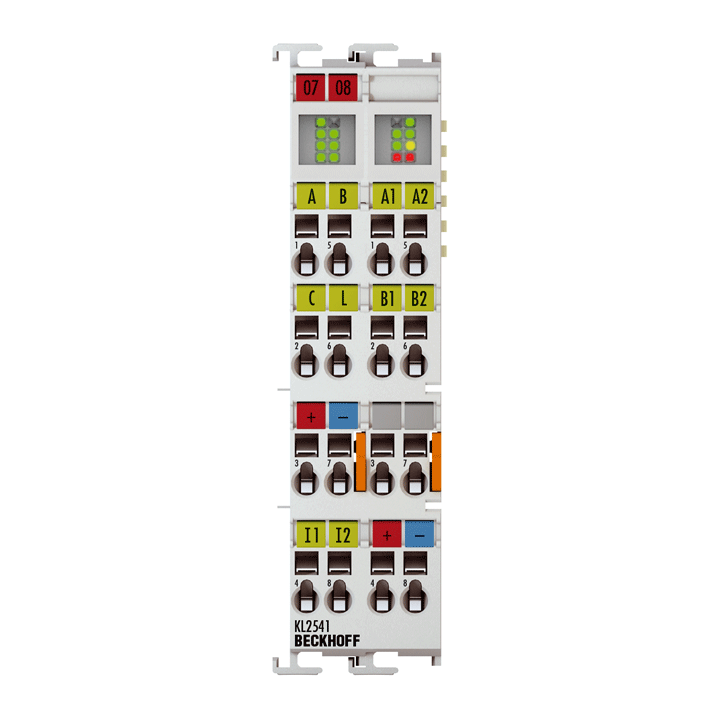
KL2541 | Bus Terminal, 1-channel motion interface, stepper motor, 48В VВ DC, 5В A, with incremental encoder
0,00 ₽The KL2541 Bus Terminal is intended for stepper motors with medium performance range. The PWM output stages cover a wide range of voltages and currents. Together with two inputs for limit switches, they are located in the Bus Terminal. The stepper motor terminal KL2541 can be adjusted to the motor and the application by changing just a few parameters. 64-fold micro stepping ensures particularly quiet and precise motor operation. Together with a stepper motor, the KL2541 represents an inexpensive small servo axis.
-
KL2545 | Bus Terminal, 2-channel PWM output, 8…50 V DC, 3.5 A, current-controlled
0,00 ₽The KL2545 output terminal controls an output current via pulse width control of the supply voltage. It is galvanically isolated from the K-bus. The current value (0 to В±3.5 A) is specified by the automation device via a 16 bit value. The output stage is protected against overload and short-circuit. The Bus Terminal contains two channels that indicate their signal state by means of light emitting diodes. The LEDs simplify local diagnosis by displaying typical load and wiring faults.
-
KL2552 | Bus Terminal, 2-channel motion interface, DC motor, 48В VВ DC, 5В A
0,00 ₽Шинный терминал KL2552 обеспечивает прямую работу двух двигателей постоянного тока. Он гальванически изолирован от шины K-bus. Скорость задается устройством автоматизации с помощью 16-битного значения. Подключение инкрементального энкодера позволяет реализовать простую сервоось. Типичные параметры двигателя могут быть установлены, чтобы избежать критических состояний двигателя постоянного тока. Нагрузка может быть защищена путем ограничения максимальных значений скорости, крутящего момента и ускорения. Выходной каскад защищен от перегрузки и короткого замыкания. Шинный терминал содержит два канала, которые показывают состояние своего сигнала с помощью светодиодов. Светодиоды обеспечивают быструю локальную диагностику.
-
KL2791 | Bus Terminal, 1-channel motion interface, AC motor, 230В VВ AC, 0.9В A
0,00 ₽The KL2791-xxxx AC motor speed controller is intended for direct connection of different low-power single-phase AC motors. The KL2791 enables speed reduction of typical motors such as capacitor motors, universal motors and shaded-pole motors. The required output power is specified via the process data. The output setting matches respective output value through targeted on and off switching at optimized times. This technique is particularly suitable for drives with quadratic load characteristic such as fans and pumps.

Compact drive technology





























1 2